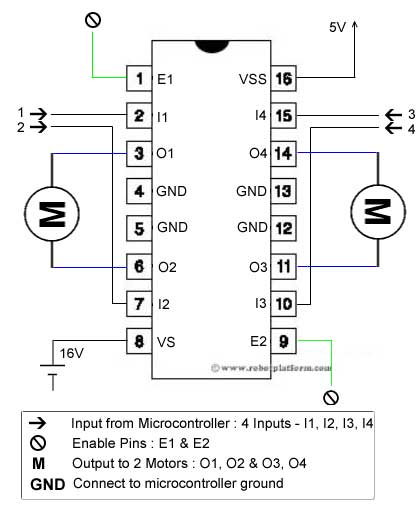
L293D
사용 예제
int PIN_CONTROL_1 = 7;
int PIN_CONTROL_2 = 8;
int PIN_ENABLE = 9;
void setup() {
pinMode(PIN_CONTROL_1, OUTPUT);
pinMode(PIN_CONTROL_2, OUTPUT);
pinMode(PIN_ENABLE , OUTPUT);
}
void loop() {
/******************/
/* 전진 */
/******************/
digitalWrite(PIN_CONTROL_1, HIGH);
digitalWrite(PIN_CONTROL_2, LOW);
//속도:0%
analogWrite(PIN_ENABLE, 0);
delay(5000);
//속도:50%
analogWrite(PIN_ENABLE, 128);
delay(5000);
//속도:100%
analogWrite(PIN_ENABLE, 255);
delay(5000);
/******************/
/* 후진 */
/******************/
digitalWrite(PIN_CONTROL_1, LOW);
digitalWrite(PIN_CONTROL_2, HIGH);
//속도:0%
analogWrite(PIN_ENABLE, 0);
delay(5000);
//속도:50%
analogWrite(PIN_ENABLE, 128);
delay(5000);
//속도:100%
analogWrite(PIN_ENABLE, 255);
delay(5000);
}